DimOS Hackathon · experimental · 2026
PACK MIND
Every team makes robot dogs that share a map.
We made them share a mind.
share meaning, not maps
zone names · never coordinates
fault-tolerant fleet memory
the problem
Multi-robot usually means merging maps.
That's months of brittle SLAM.
Co-localize everything
Two dogs = two SLAM origins. To share one map you must fuse frames — fragile, and it breaks the moment a loop closes wrong.
Heavy & slow
Map-merge is weeks-to-months of engineering before any coordination happens. Wrong layer to build on in 48 hours.
The reframe
Skip the map. Let each dog keep its own. Share only meaning — what's searched, what's found. Share a mind, not a map.
The whole bet: the useful thing to share between robots is operational memory, not geometry.
the insight
Static zones are a brittle special case of shared memory.
Fixed partition
Alpha→NORTH, Bravo→MIDDLE, Charlie→SOUTH. One finishes early and sits idle. One goes offline and its region is never searched. Indistinguishable from a hardcoded script.
Shared memory
Any body writes what it sees; any body reads and acts. Who-does-what emerges from who's free and what memory says — and it survives a robot dropping.
how it works
Every dog, every tick: sense → remember → choose → plan → move.
SHARED → no two dogs re-search the same ground
INDEPENDENT → dogs re-cover each other's trails
what makes it magic
Two beats a script can't fake.
BEAT 1 · HANDOFF
A body writes. Any body acts.
Alpha finds the target and writes it to the pack's memory. I ask Bravo — which was never there — and Bravo walks straight to it. One sees, the whole pack knows.
Bravo acting on Alpha's memory
BEAT 2 · INHERITANCE — the kicker
The mission outlives the robot.
Take the finder offline. Its findings persist and its unsearched ground is reclaimed by the survivor. A database doesn't do that — roles are emergent and fungible.
drop a dog → knowledge loss: 0
Alpha saw it. Bravo remembered it. The pack acted. One memory, many bodies.
the proof · sim A/B, same dogs, same start
Only one variable changes: shared memory.
246 vs 335
ticks to full coverage — shared vs independent. No two dogs search the same ground.
0.80→0.32
Independent: kill a dog and its searched ground vanishes — team knowledge collapses.
drop 0
Shared: kill a dog and its discoveries stay. Knowledge persists; survivors finish.
The honest claim: complete-area coverage, faster & without re-search — and robot-failure tolerance. Not "races to the object faster."
58 tests passing
pure-numpy sim · no GPU
live + web A/B + DimOS Viewer
why this is worth money
We don't sell robot dogs. We sell the memory layer.
The hardware
commoditizing ↓
Cheaper · longer battery · more agile. Every vendor races on the same axes — a sprint to the bottom. The dog is a replaceable body.
The memory layer — us
compounding ↑
Fleet memory · mission intelligence · shared semantic blackboard. Value grows with fleet size and runtime — hardware-agnostic.
↓ duplicated patrol
↓ labor cost
↑ area coverage
↑ incident response
shared audit trail
robot-failure tolerance
Run it long enough and the site itself becomes legible — recurring anomalies, chronic blind spots, high-risk hours. Hardware keeps getting cheaper; spatial operating memory only gets more valuable.
where it lands
Pitch with rescue. Land in enterprise patrol.
Phase 1 · Patrol dashboard
Factories · warehouses · campuses · data centers. Shared patrol record, auto incident reports, no re-patrol.
Phase 2 · Mission allocation
Who's nearest? Enough battery? Which zone unchecked? Highest-priority task — assigned straight from shared memory.
Phase 3 · Memory platform
Spatial risk maps · recurring-fault analysis · cross-shift knowledge transfer. The site's long-term operating memory.
honest scope —
live = teleop-assisted
detection = color filter
autonomy shown in sim
1 coordinator → replicate next
the one image to remember
One memory. Many bodies. That's Pack Mind.
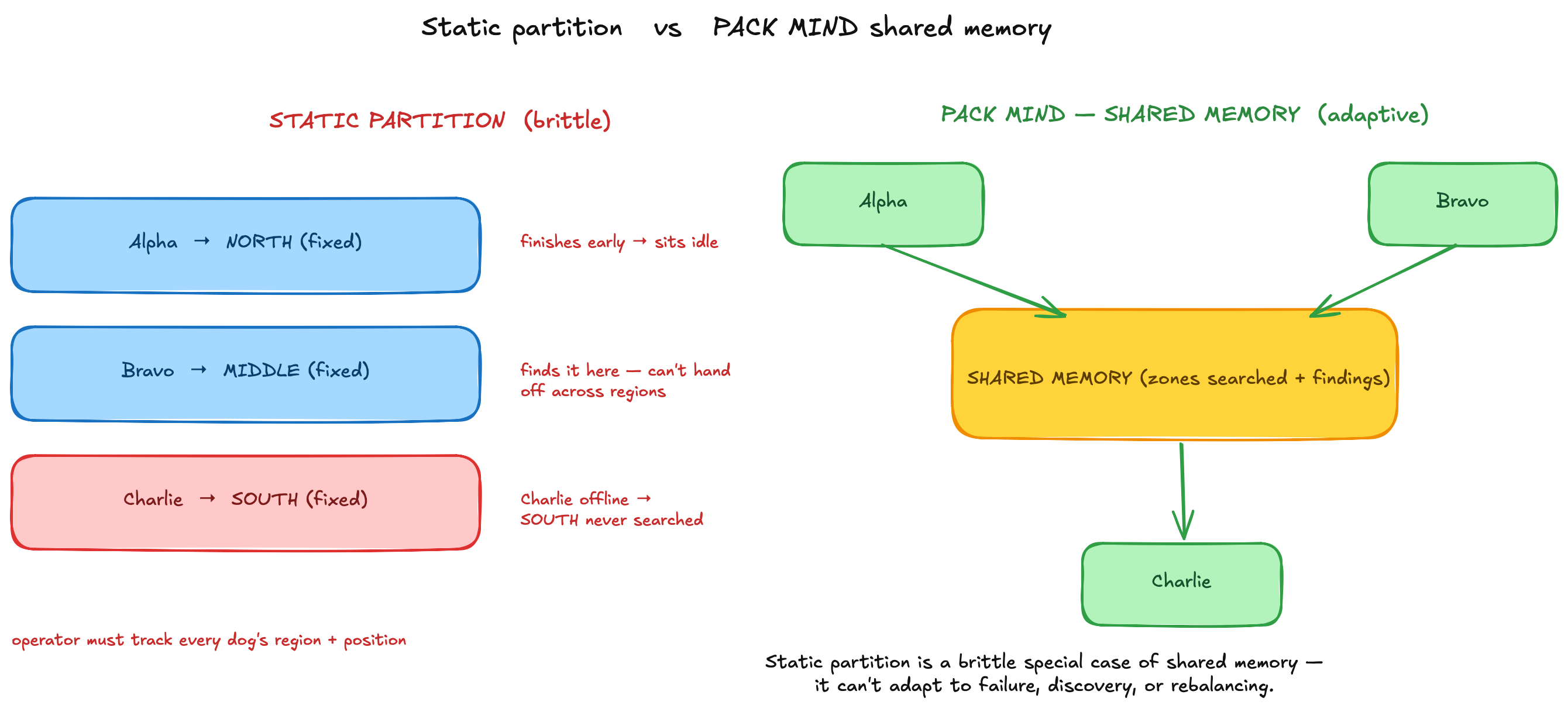 static partition (left) can't adapt · shared memory (right) rebalances
static partition (left) can't adapt · shared memory (right) rebalances
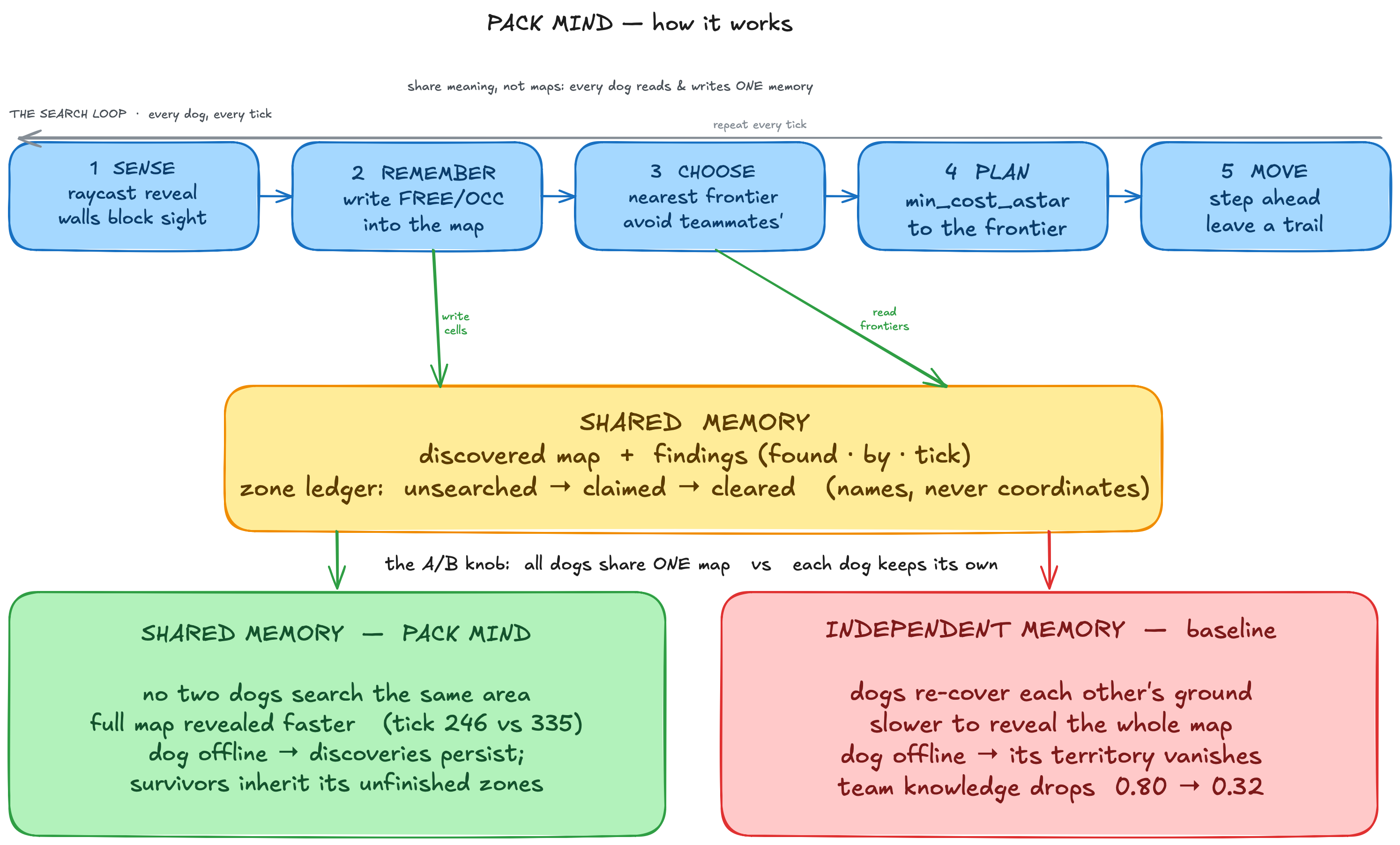 one shared map + zone ledger · the A/B knob = share one memory, or each dog keeps its own
one shared map + zone ledger · the A/B knob = share one memory, or each dog keeps its own